Sea \(\mathcal{R}=[a_1,b_1]\times [a_2,b_2]\times [a_3,b_3]\subseteq \mathbb{R}^3\) un cubo
y sea \(f:\mathcal{R}\to \mathbb{R}\) una función Riemann integrable. Entonces la integral
sobre \(\mathcal{R}\) se puede calcular mediante las integrales iteradas
\[
\int_{\mathcal{R}}f = \int_{a_1}^{b_1}\int_{a_2}^{b_2}\int_{a_3}^{b_3} f(x,y,z)dzdydx
\]
Notas.
El orden de integración se puede cambiar, teniendo cuidado que se integre
la variable adecuada, por ejemplo se valen las fórmulas
\begin{eqnarray*}
\int_{\mathcal{R}}f &=& \int_{a_1}^{b_1}\int_{a_3}^{b_3}\int_{a_2}^{b_2} f(x,y,z)dydzdx\\
\int_{\mathcal{R}}f &=& \int_{a_3}^{b_3}\int_{a_2}^{b_2}\int_{a_1}^{b_1} f(x,y,z)dxdydz
\end{eqnarray*}
Ya que tenemos tres variables y las diferenciales pueden ordenarse de cualquier forma se tienen
\(3!=6\) diferentes ordenes de integración.
Se enunció el resultado para tres dimensiones pero también es válido para cuatro, cinco o cualquier número
de dimensiones.
Corolario
Sea \(\mathcal{R}=[a_1,b_1]\times \cdots \times [a_n,b_n]\) un rectángulo en \(\mathbb{R}^n\) y
\(f:\mathcal{R} \to \mathbb{R}\) una función continua, excepto tal vez en un
conjunto de contenido cero.
Entonces \(f\) es integrable y
\[
\int_{\mathcal{R}}f=\int_{a_1}^{b_1} \cdots \int_{a_n}^{b_n} f(x_1,\dots, x_n)dx_n\cdots dx_1
\]
Definición
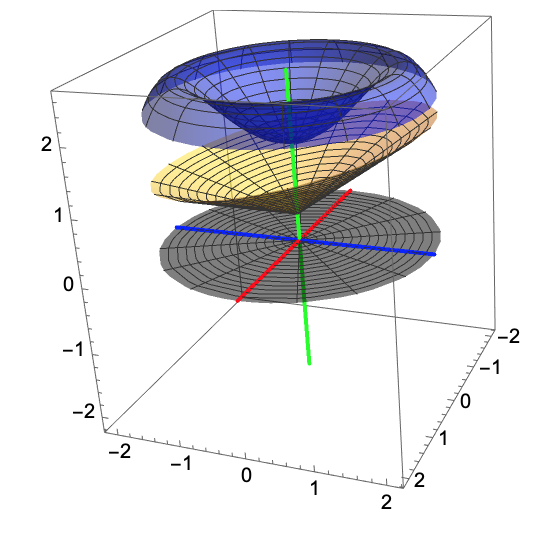
Una región de tipo \(I\) en \(\mathbb{R}^3\) es un subconjunto
\(\mathcal{S}\) que se puede describir como
\[
\mathcal{S }=\{(x,y,z): (x,y)\in \mathcal{D}, g_1(x,y) \leq z \leq g_2(x,y)\}
\]
donde \(\mathcal{D}\) es la proyección de \(\mathcal{S}\) en el plano \(xy\)
y las funciones \(g_1,g_2:\mathcal{D}\to \mathbb{R}\) son continuas.
En otras palabras, \(\mathcal{S}\) es la región entre las gráficas
de \(g_1\) y \(g_2\).
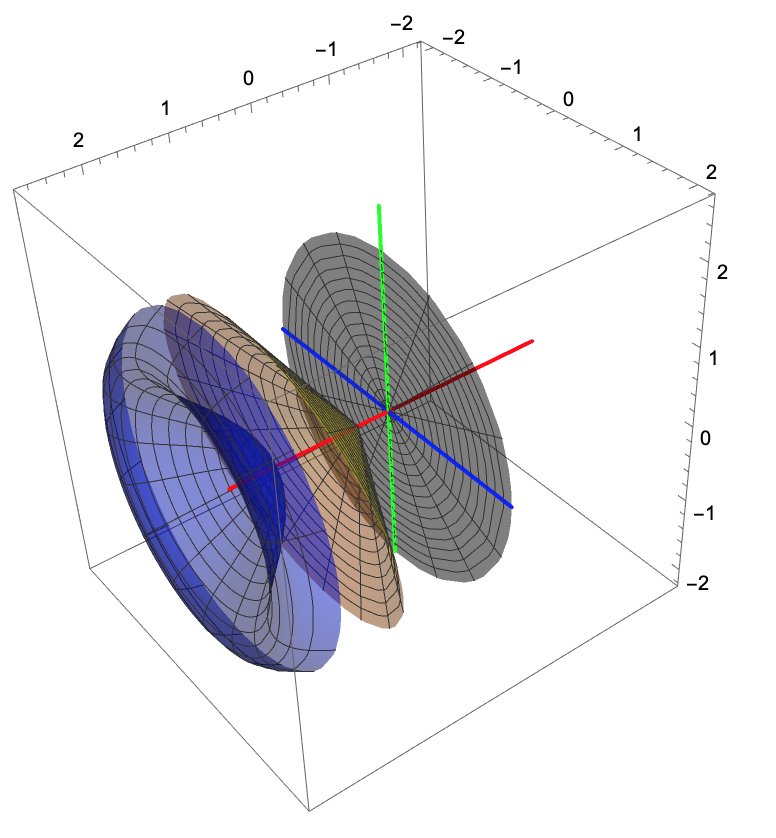
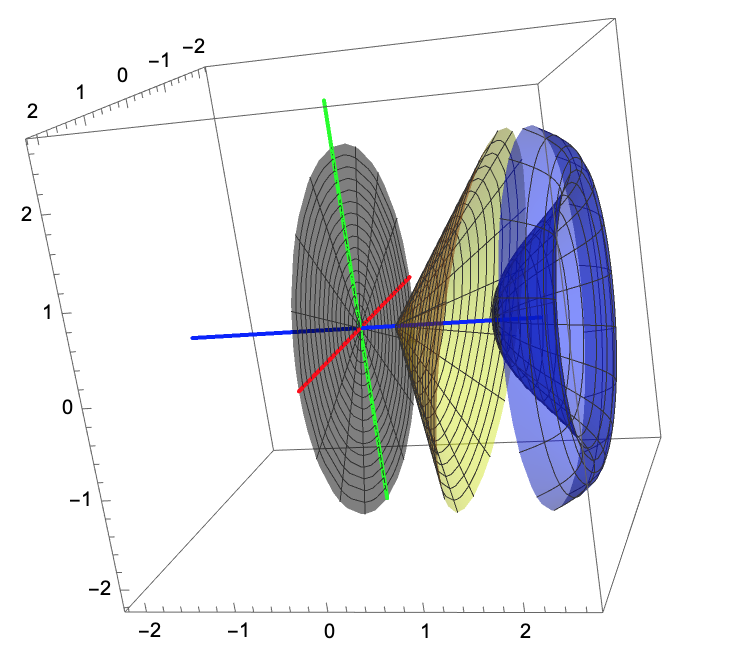
De manera similar, las regiones de tipo II y III se pueden describir, respectivamente, como
\[
\mathcal{S}=\{(x,y,z): (y,z)\in \mathcal{D}, g_1(y,z)\leq x \leq g_2(y,z) \}
\]
donde \(\mathcal{D}\) es la proyección en el plano \(yz\),
\[
\mathcal{S}=\{(x,y,z): (x,z)\in \mathcal{D}, g_1(x,z)\leq y \leq g_2(x,z) \}
\]
donde \(\mathcal{D}\) es la proyección en el plano \(xz\).
Teorema
Sea \(\mathcal{S}\) una región de tipo I, digamos que
es la región entre las gráficas de las funciones
\(g_1,g_2:\mathcal{D}\to \mathbb{R}\). Sea \(f:\mathcal{S}\to \mathbb{R}\)
una función continua en \(\mathcal{S}\), entonces
\[
\int_{\mathcal{S}}f= \int_{\mathcal{D}}\left( \int_{g_1(x,y)}^{g_2(x,y)}f(x,y,z)dz\right)dx\otimes dy
\]
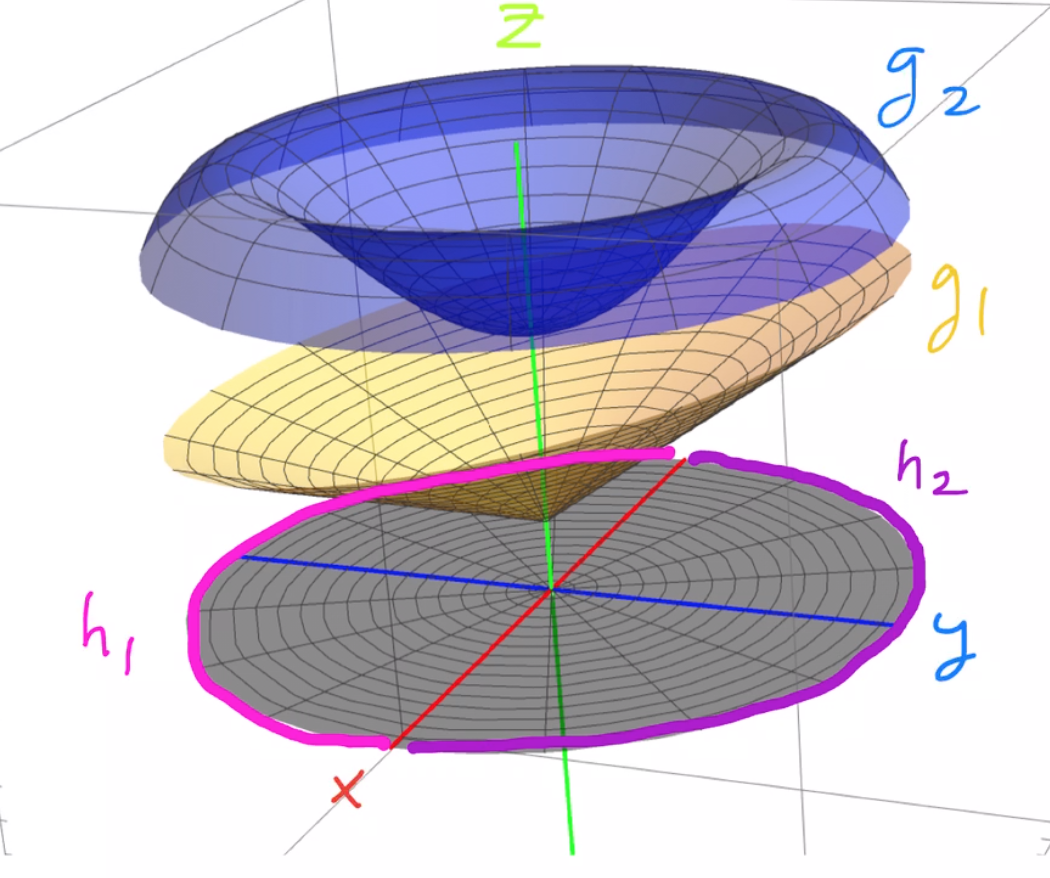
Nota
Si en el teorema anterior en la región \(\mathcal{S}\),
\[
\mathcal{S}=\{(x,y,z): (x,y)\in \mathcal{D}, g_1(x,y) \leq z \leq g_2(x,y)\}
\]
cumple que a su vez \(\mathcal{D}\) es una región de tipo I,
digamos que es la región entre las gráficas de \(h_1,h_2\)
\[
\mathcal{D}=\{ (x,y): a\leq x \leq b, h_1(x)\leq y \leq h_2(x) \}
\]
la integral se puede calcular como
\[
\int_{\mathcal{S}}f= \int_{a}^{b}\int_{h_1(x)}^{h_2(x)}\int_{g_1(x,y)}^{g_2(x,y)}f(x,y,z)dzdydx
\]
De manera similar, si \(\mathcal{D}\) es una región de tipo II,
\[
\mathcal{D}=\{ (x,y): c\leq y \leq d, h_1(y)\leq x \leq h_2(y) \}
\]
la integral se puede calcular como
\[
\int_{\mathcal{S}}f= \int_{c}^{d}\int_{h_1(y)}^{h_2(y)}\int_{g_1(x,y)}^{g_2(x,y)}f(x,y,z)dzdxdy
\]
Nota que cambio en el orden de integración entre las dos últimas fórmulas.
Todas las posibles combinaciones de \(\mathcal{S}\) región de tipo I,II,III se pueden tener
con su proyección, \(\mathcal{D}\) siendo proyección de tipo I o II.
Ejercicio
Calcula las siguientes integrales.
\(\int_{\mathcal{D}} xyz \) donde \(\mathcal{D}\) es el cubo vértices
\begin{eqnarray*}
(a,a,a),(a,-a,a),(-a,a,a),(-a,-a,a),\\
(a,a,-a),(a,-a,-a),(-a,a,-a),(-a,-a,-a),
\end{eqnarray*}
donde \(a>0\).
\(\int_{\mathcal{D}} x+y+z\) donde \(\mathcal{D}\) es el tetrahedro
con vértices \[(0,0,0), (a,0,0), (0,a,0), (0,0,b)\]
donde \(a,b>0\) son constantes.
\(\int_{\mathcal{D}} x^2+y^2+z^2 \) donde \(\mathcal{D}\) es el
tetrahedro con vértices
\[(0,0,0), (1,0,0), (0,1,0), (0,0,1)\]
\(\int_{\mathcal{D}} xy\) donde \(\mathcal{D}\) es la región del primer octante
debajo del plano \(z=x+y+2\).
\(\int_{\mathcal{D}} 2x-3y+z\) donde \(\mathcal{D}\) es
la región delimitada por el cilindro \(z^2+y^2=4\), los planos \(x=1\),
\(y=2x\), \(z=0\) en el primer cuadrante.
\(\int_{\mathcal{D}} x \) donde \(\mathcal{D}\) es la
región encerrada por el paraboloide \(x=2y^2+2z^2\) y el plano
\(x=6\).
\(\int_{\mathcal{D}} x \) donde \(\mathcal{D}\) es la
región encerrada por el paraboloide \(x=4y^2+2z^2\) y el plano
\(x=2\).
\(\int_\mathcal{D} xy+x\) donde \(\mathcal{D}\) es la región
delimitada por los paraboloides
\(y=x^2+y^2\), \(y=27-2x^2-2y^2\).
Ejercicio
Reescribe la integral iterada en las otras 5 formas equivalentes (\(f\) denota
una función continua sobre el dominio adecuado).
Sea \(U\subset \mathbb{R}^n\) un abierto y
\(T:U\to \mathbb{R}^n\) una función diferenciable en todo punto de \(U\).
El Jacobiano de \(T\), en el punto \(p\), es el determinante de la matriz
de derivadas parciales de \(T\) en \(p\).
Por ejemplo si \(T\) es una función de dos variables
\[
T(x,y)=(u(x,y),v(x,y))
\]
el Jacobiano es
\[
J_T=\det
\left[
\begin{array}{cc}
\partial_xu & \partial_yu \\
\partial_xv & \partial_yv
\end{array}
\right]
\]
Haciendo énfasis en las funciones coordenadas
\(u,v\) y las variables \(x,y\), otra notación para el Jacobiano es \(\frac{\partial(u,v)}{\partial(x,y)}\)
Nota que el Jacobiano es una función. Por ejemplo si \(u(x,y)=x^2-y^2, v(x,y)=xy-x^2\) entonces
\[
J_T(x,y)=
\det
\left[
\begin{array}{cc}
2x & -2y \\
y-2x & x
\end{array}
\right]=2x^2-(-2y)(y-2x)=2x^2+2y^2-4xy
\]
Ejercicio
Prueba las fórmulas para los siguientes Jacobianos.
Coordenadas polares.
\[
T(r,\theta)=(r\cos(\theta),r\sen(\theta))
\]
Entonces
\[
J_T=r
\]
Coordenadas cilíndricas.
\[
T(r,\theta,z)=(r\cos(\theta),r\sen(\theta),z)
\]
Entonces
\[
J_T=r
\]
Cambio de coordenadas afin.
\[
T(x_1,\dots, x_n)=A(x_1,\dots, x_n)+p
\]
donde \(A\) es una matriz de \(n\times n\) y \(p\in \mathbb{R}^n\) es un vector fijo. Entonces
\[
J_T=\det(A)
\]
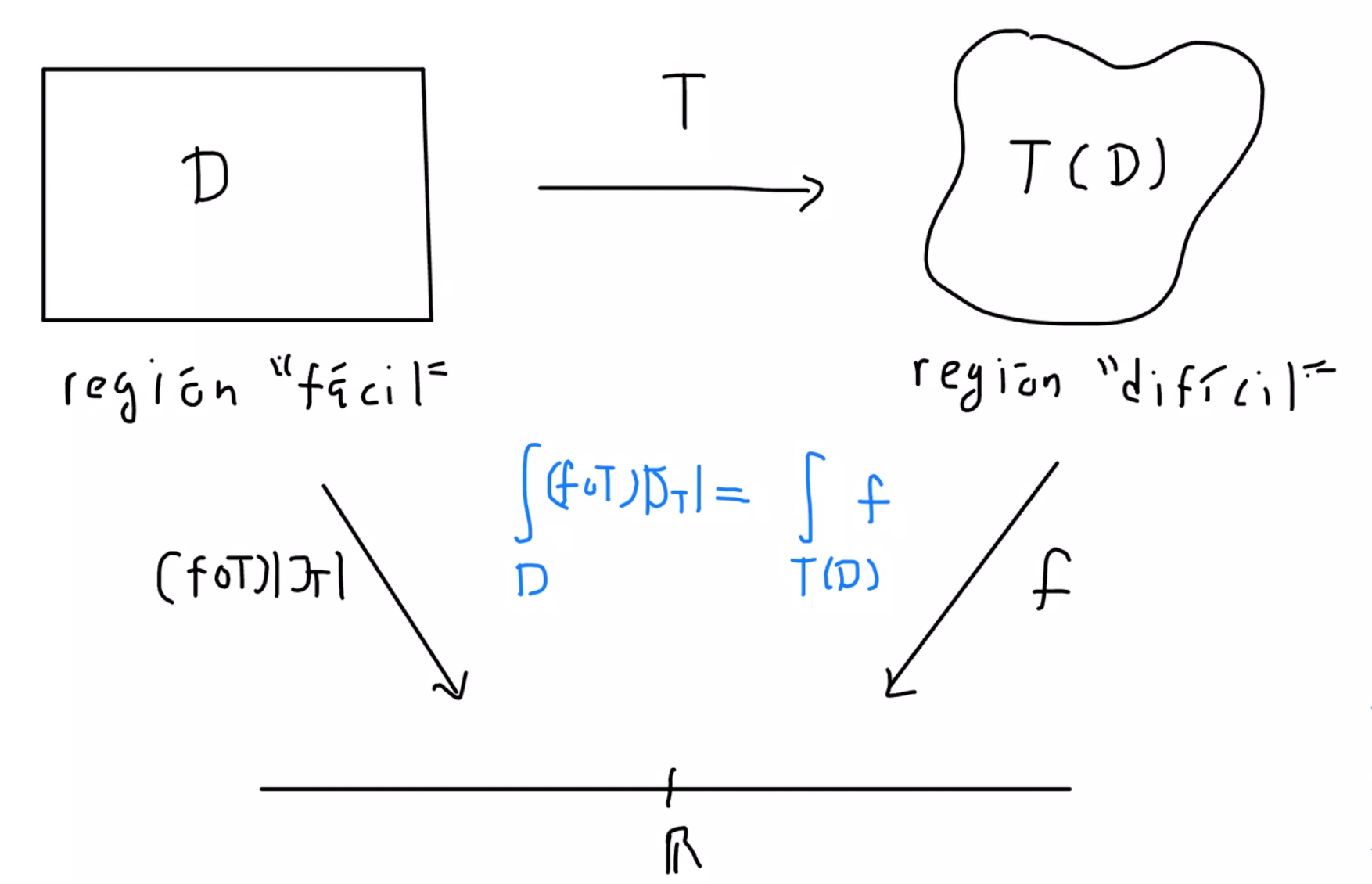
Teorema
Sea \(U\subseteq \mathbb{R}^n\) un conjunto abierto y
\(T:U\to \mathbb{R}^n\) una función clase \(C^1\) con la
característica de que el Jacobiano \(J_T\) no se anula en \(U\). Si
\(\mathcal{D}\subseteq U\) es un conjunto abierto con interior no vacío
y \(f\) es una función continua definida en \(T(\mathcal{D})\) entonces
\[
\int_{T(\mathcal{D})} f = \int_{\mathcal{D}} (f\circ T )|J_T|
\]
Corolario
Coordenadas cilíndricas
Para coordenadas cilíndricas \(T:(0,\infty)\times (0,2\pi)\times (-\infty,\infty) \to \mathbb{R}^3\),
\[
T(r,\theta,z)=(r\cos(\theta),r\sen(\theta),z)
\]
se tiene que
\[
\int_{T(\mathcal{S})}f=\int_{\alpha}^{\beta}\int_{h_1(\theta)}^{h_2(\theta)}\int_{u_1(r,\theta)}^{u_2(r,\theta)}f(r\cos(\theta),r\sen(\theta))rdzdrd\theta
\]
donde \(\mathcal{S}=\{(r,\theta,z): \alpha \leq \theta \leq \beta, h_1(\theta)\leq r \leq h_2(\theta), u_1(r,\theta)\leq z \leq u_2(r,\theta)\}\).
Coordenadas esféricas
Para coordenadas cilíndricas \(T:(0,\infty)\times (0,2\pi)\times (0,\pi) \to \mathbb{R}\)
\[
T(\rho, \theta, \phi)=(\rho\sen(\phi)\cos(\theta),\rho\sen(\phi)\sen(\theta), \rho\cos(\phi))
\]
se tiene que
\[
\int_{T(\mathcal{S})}f=\int_{\alpha}^{\beta}\int_{h_1(\theta)}^{h_2(\theta)}\int_{u_1(r,\theta)}^{u_2(r,\theta)}f(\rho\cos(\theta),\rho\sen(\theta))\rho^2\sen(\phi) d\phi d\rho d\theta
\]
donde \(\mathcal{S}=\{(\rho,\theta,\phi): \alpha \leq \theta \leq \beta, h_1(\theta)\leq \rho \leq h_2(\theta), u_1(\rho,\theta)\leq \phi \leq u_2(\rho,\theta)\}\).
Ejercicio
Calcula las siguientes integrales.
\(\int_{\mathcal{D}}\sqrt{2x^2+2y^2}\), donde \(\mathcal{D}\) es la
región dentro del cilindro \(x^2+y^2=25\) y entre los planos \(z=-1, z=9\).
\(\int_{\mathcal{D}} 2z+y^2\), donde \(\mathcal{D}\) es la región delimitada por el
paraboloide \(z=3x^2+3y^2\) y el plano \(z=9\).
\(\int_{\mathcal{D}} x+2y+z\), donde \(\mathcal{D}\) es la región en el primer octanten
bajo el paraboloide \(z=9-x^2-y^2\).
\(\int_{\mathcal{D}} x^2+y^4\), donde \(\mathcal{D}\) es la región dentro del
cilindro \(x^2+y^2=4\), arriba del plano \(z=0\) y por debajo del cono
\(z^2=9x^2+9y^2\).
Ejercicio
Calcula las siguientes integrales.
\(\int_\mathcal{D} 5-x^2-y^2\), donde \(\mathcal{D}\) es el hemisferio \(x^2+y^2+z^2 \leq 1\), \(z\geq 0\).
\(\int_{\mathcal{D}} x+y+z \), donde \(\mathcal{D}\) es la región entre las esferas
\(x^2+y^2+z^2=1\) y \(x^2+y^2+z^2=9\)
\(\int_{\mathcal{D}} xyz\), donde \(\mathcal{D}\) es la región entre las esferas
\(x^2+y^2+z^2=4, x^2+y^2+z^2=16\) y arriba del cono \(\phi=\pi/6\).
\(\int_{\mathcal{D}} ye^{x^2+y^2+z^2}\), donde \(\mathcal{D}\) es la parte de la bola centrada en el origen
de radio \(a>0\) en el primer octante.
Nota
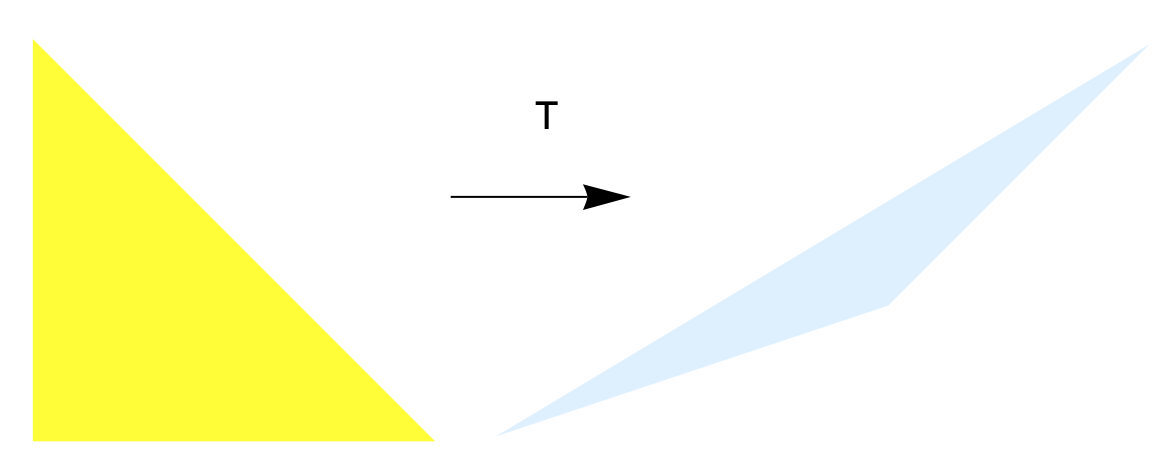
Cambio de coordenadas afines
Para triángulos, tetrahedros, paralelepipedos y en general polígonos los cambios de coordenadas afines son muy útlies.
Por ejemplo para calcular la integral \(\int_{\mathcal{D}} x^2+y\) donde \(\mathcal{D}\)
es el triángulo con vértices
\[
(1,1), (4,2), (6,4)
\]
un método es tratar de ver \(\mathcal{D}\) como unión de regiones tipo I ó II. Pero otro método es
usar un cambio de coordenadas afin, es decir encontrar una transoformación afín tal que \(T(\mathcal{R})=\mathcal{D}\),
donde \(\mathcal{R}\) es el triángulo canónico \((0,0), (1,0), (0,1)\).
Paso 1: Mover el triángulo al origen.
Fijamos un vértice (cualquier vértice), \(p=(1,1)\) y
trasladamos el triángulo para que tenga un vértice en el origen:
\begin{eqnarray*}
p_0&=&(1,1)-p=(0,0),\\
p_1&=&(4,2)-p=(3,1),\\
p_2&=&(6,4)-p=(5,3).
\end{eqnarray*}
Paso 2: La matriz.
Encontrar una transformación lineal que mande los vectores canónicos a los
lados del triángulo. Es decir encontrar una matriz \(A\) que cumpla:
\begin{eqnarray*}
Ae_1=p_1\\
Ae_2=p_2.
\end{eqnarray*}
Esto se logra poniendo los vectores \(p_1,p_2\) como columnas de \(A\), es decir
\[
A=\left[
\begin{array}{cc}
3 & 5 \\
1 & 3
\end{array}
\right]
\]
Paso 3: La transformación afin.
Fimalmente la transformación que manda el triángulo canónico a triángulo con vértices
\((1,1), (4,2), (6,4)\) es
\[
T(u,v)=A(u,v)+p=(3u+5v+1,u+3v+1)
\]
Finalmente la integral es
\begin{eqnarray*}
\int_{\mathcal{D}} x^2+y &=& \int_{T(\mathcal{R})} f(x,y) \\
&=& \int_{\mathcal{R}} f(T(u,v))|J_T| \\
&=& \int_{\mathcal{R}} [(3u+5v+1)^2+(u+3v+1)]\det(A) \\
&=& (9-5)\int_{0}^1\int_{0}^{1-u} (3u+5v+1)^2+(u+3v+1) dv du\\
&=&4\frac{101}{12}=\frac{101}{3}
\end{eqnarray*}
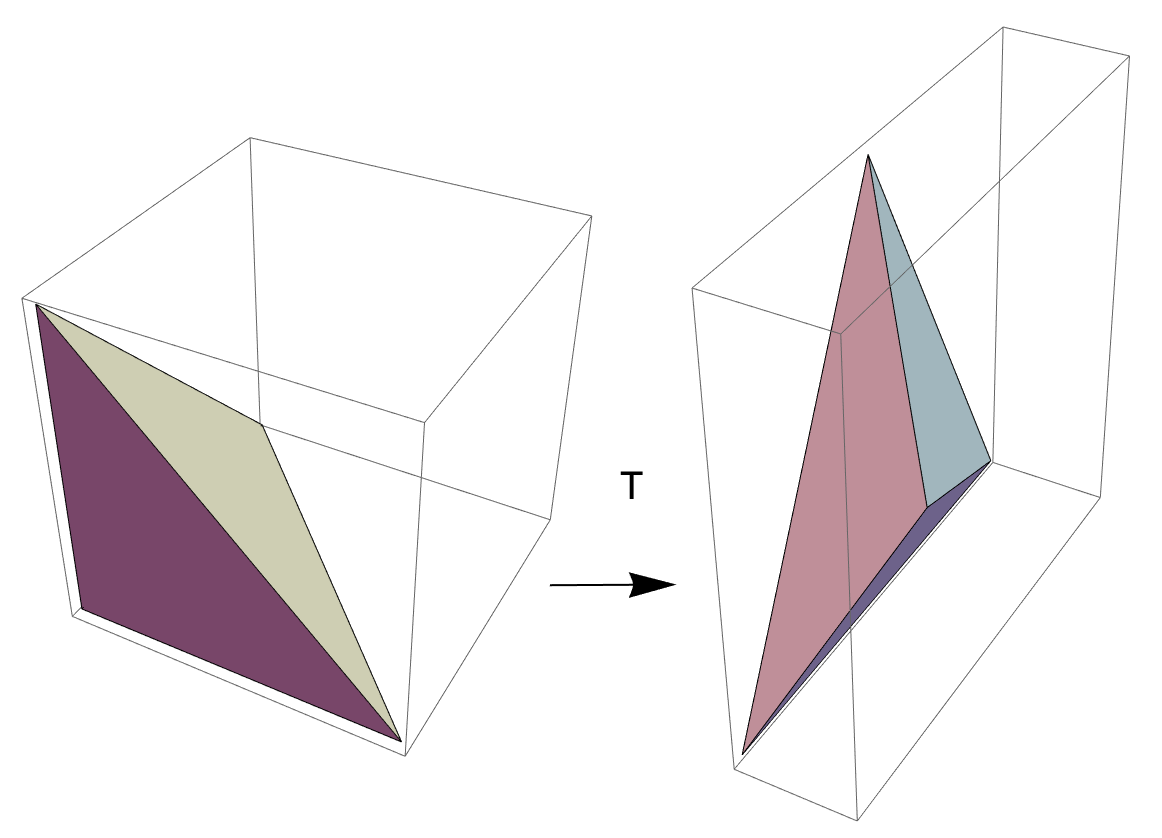
Calcular la integral \(\int_{\mathcal{D}} x-y+2z\) donde \(\mathcal{D}\) es el
tetrahedro con vértices \((1,2,3), (1,6,3), (2,3,5),(1,4,7) \).
Primero encontramos una transformación afin que manda el tetrahedro canónico
(es decir, con vértices \((0,0,0), (1,0,0), (0,1,0), (0,0,1)\)) al
tetrahedro \(\mathcal{D}\).
Paso 1: Mover tetrahedro al origen.
Fijamos un vértice \(p=(1,2,3)\) (puede ser cualquier vértice) y se traslada el tetrahedro
para que tenga un vértice en el origen:
\begin{eqnarray*}
p_0&=&(1,2,3)-p=(0,0,0),\\
p_1&=&(1,6,3)-p=(0,4,0),\\
p_2&=&(2,3,5)-p=(1,1,2),\\
p_3&=&(1,4,7)-p=(0,2,4).
\end{eqnarray*}
Paso 2: La matriz.
Encontrar una transformación lineal que mande los vectores canónicos a los lados del
tetrahedro. Es decir una matriz \(A\) tal que
\begin{eqnarray*}
Ae_1=p_1,\\
Ae_2=p_2,\\
Ae_3=p_3.
\end{eqnarray*}
lo anterior se logra colocando los vectores \(p_1,p_2,p_3\) como columnas de \(A\), es decir
\begin{eqnarray*}
A=\left[
\begin{array}{ccc}
0 & 1 & 0 \\
4 & 1 & 2 \\
0 & 2 & 4
\end{array}
\right]
\end{eqnarray*}
Paso 3: La transformación afin.
La transformación afin que mando el tetrahedro canónico a \(\mathcal{D}\) es
\[
T(u,v,w)=A(u,v,w)+p=(v+1,4u+v+2w+2,2v+4w+3)
\]
Finalmente la integral es
\begin{eqnarray*}
\int_{\mathcal{D}} x-y+2z &=&\int_{T(\mathcal{R})} f(x,y,z) \\
&=& \int_{\mathcal{R}} f(T(u,v,w))|J_T| \\
&=& \int_{\mathcal{R}} [(v+1)-(4u+v+2w+2)+2(2v+4w+3)]\det(A) \\
&=& (-16)\int_{0}^1 \int_{0}^{1-u}\int_{0}^{1-u-v} (-4u+4v+6w+5) dwdvdu \\
&=& (-16)\frac{3}{8}=-6
\end{eqnarray*}
Para paralelepipedos y poligonos más generales la táctica es
"triangularlos", después separa la integral usando la
Linealidad con respecto a regiones
y finalmente calcular la integral sobre cada una de las triangulaciones, como se
hizo en los casos anteriores.
Ejercicio
Calcula las siguientes integrales.
\(\int_{\mathcal{D}} 2x-6y\), donde \(\mathcal{D}\) es el triángulo con vértices
\((1,1), (5,2), (3,6)\).
\(\int_{\mathcal{D}} x+y+z\), donde \(\mathcal{D}\) es el tetrahedro con vértices
\((0,0,0), (2,0,0), (0,4,0), (1,1,6)\).
\(\int_{\mathcal{D}} 3x+y\), donde \(\mathcal{D}\) es el paralelogramo
con vértices \((1,1),(1,3),(5,2),(6,7)\).
\(\int_{\mathcal{D}} 5x-2y+3z\), donde \(\mathcal{D}\) es el paralepipedo
con vértices
\begin{eqnarray*}
(0,0,0),(3,1,0),(2,4,0),(5,6,0),\\
(1,0,6),(0,2,6),(3,1,6),(1,4,6).
\end{eqnarray*}
Ejercicio
Sea \(f:[0,1]\to \mathbb{R}\) una función continua y sea
\(\mathcal{D}\) el triángulo canónico. Prueba que
\[
\int_{\mathcal{D}} f(x+y)= \int_0^1 tf(t)dt
\]