De manera informal, una superficie es un subconjunto que satisface:
localmente se parece a un pedazo de \(\mathbb{R}^2\),
es decir, tiene dimensión 2;
todo punto de la superficie admite un plano tangente.
Esta idea se puede relajar un poco permitiendo pegar o "sumar"
dos superficies, pagando el precio de que aparezcan "picos" o "dobleces",
obteniendo "superficies suaves a trozos".
Ejemplos naturales de superficies son esferas, hemisferios. Existen varias formas de definir
una superficie pero mencionamos sólo dos.
De manera implíticta, mediante ecuaciones. Por ejemplo
para la esfera de radio \(r>0\) centrada en el origen
\[
\mathcal{S}=\{(x,y,z)\in \mathbb{R}^3: x^2+y^2+z^2=r^2\}.
\]
De manera paramétrica, análogo a las curvas parametrizadas
de la Sección 3 . Para la esfera del ejemplo anterior una representación
paramétrica sería:
\begin{eqnarray*}
& & \mathbb{r}:[0,\pi]\times [0,2\pi]\to \mathbb{R}^3,\\
& & \mathbb{r}(\theta,\varphi)=(r\cos(\varphi)\sin(\theta), r\sin(\varphi)\sin(\theta), r\cos(\theta))
\end{eqnarray*}
Desde este punto de vista, la superficie realmente es la imagen de
la función \(\mathbb{r}\).
Resulta que, para las cuentas, ésta última descripción es muy útil,
así que es la que usamos en Definición 2.15 la cual
reproducimos a continuación.
Decimos que un subconjunto \(\mathcal{S} \subset \mathbb{R}^n\) es una superficie
suave parametrizada, si existe una función clase \(C^1\),
\(\mathbb{r}: \mathcal{R} \to \mathbb{R}^n\) tal que
\(\mathcal{R}\subset \mathbb{R}^2\) es una región (subconjunto compacto con interior no vacío).
\(\mathbb{r}(\mathcal{R})=\mathcal{S}\).
\(\mathcal{S}\) no se auto-corta.
Todo punto de \(\mathcal{S}\) admite un plano tangente.
Nota
Una de las formas más generales de definir una supreficie, que se generaliza
a más de dos dimensiones, es mediante el concepto de
Varidades
(el cual no veremos).
Motivación
La integral de superficie se puede interpretar como el promedio
de un flujo que atraviesa una superficie.
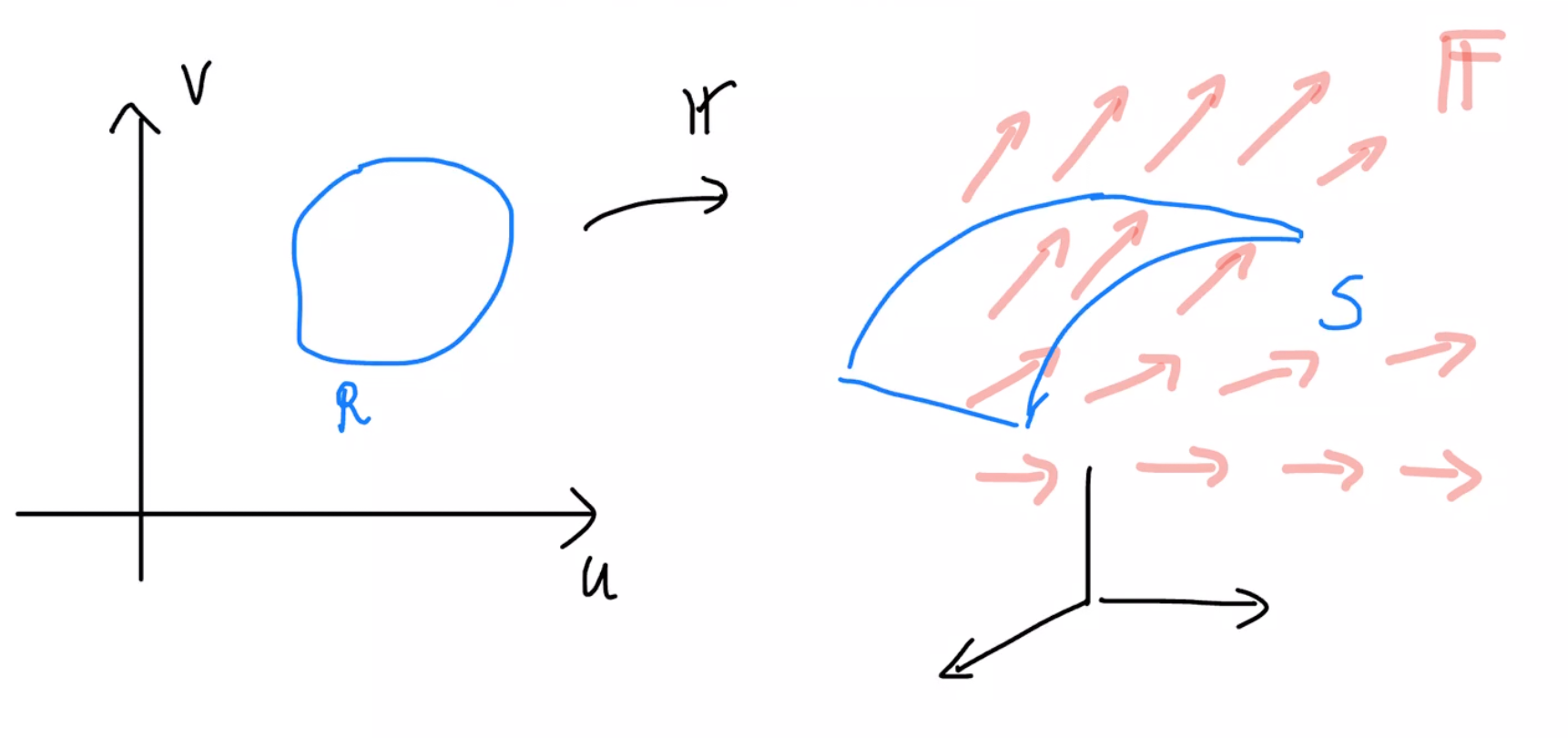
Supongamos que \(\mathcal{R}=[a,b]\times [c,d]\) y
\(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\) es una parametrización clase
\(C^1\) de la superficie \(\mathcal{S}\). Para facilitar la notación vamos a
suponer que \(\mathbb{r}\) depende de las variables \(u\) y \(v\).
Por otro lado supongamos que el campo vectorial
\(\mathbb{F}:\mathbb{R}^3 \to \mathbb{R}^3\) modela
las valocidades de un flujo.
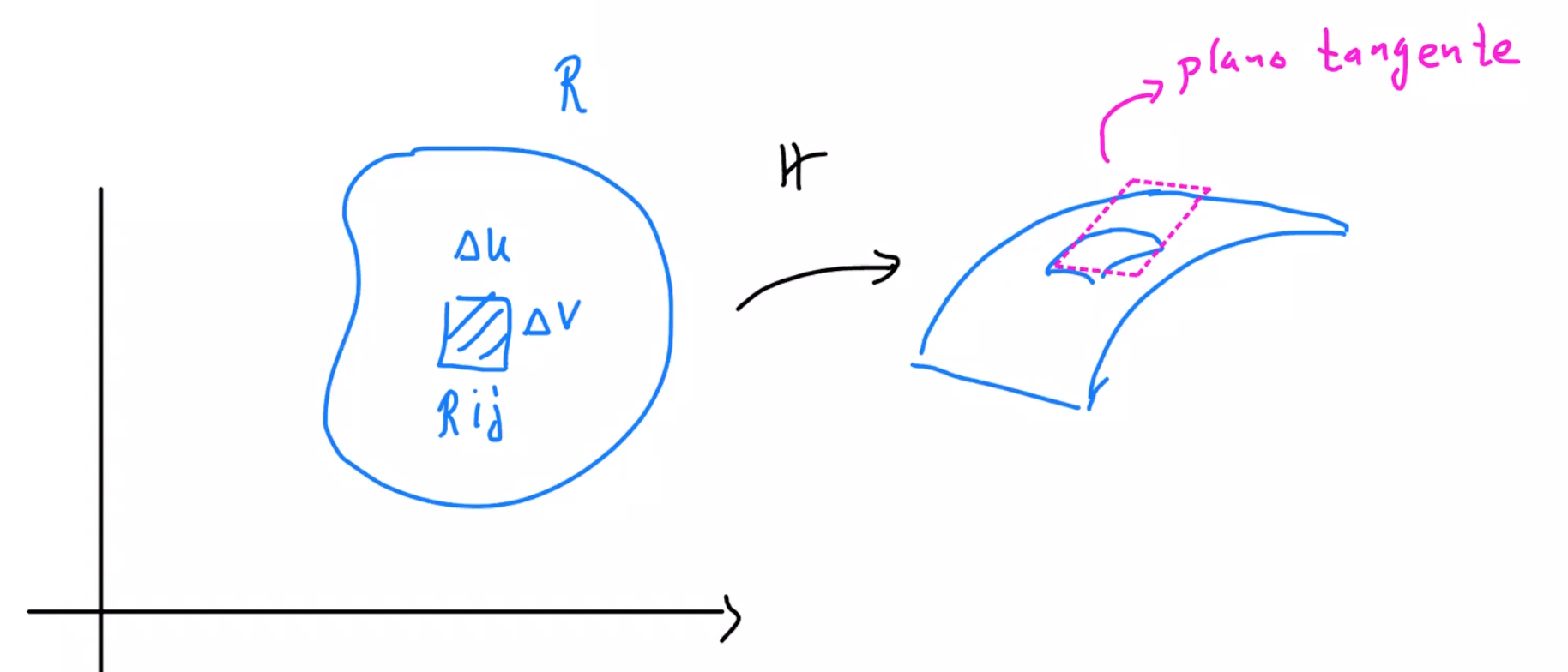
Ahora supongamos que dividimos \(\mathcal{R}\) en \(n^2\) subrectángulos
pequeños, \(\mathcal{R}_{i,j}\), \(1\leq i,j \leq n\). Vamos a analizar
el flujo que pasa através de \(\mathcal{R}_{i,j}\) que al ser pequeño
tiene la ventaja de que \(\mathbb{F}\) y \(\mathbb{r}\) son prácticamente constantes en \(\mathcal{R}_{i,j}\).
Por \(\Delta u\) vamos a denotar la longitud del lado horizontal de \(\mathcal{R}_{i,j}\)
y por \(\Delta v\) la longitud de su lado vertical.
Ahora consideramos el paralelogramo formado por los vectores \(\Delta u \partial_u \mathbb{r}\)
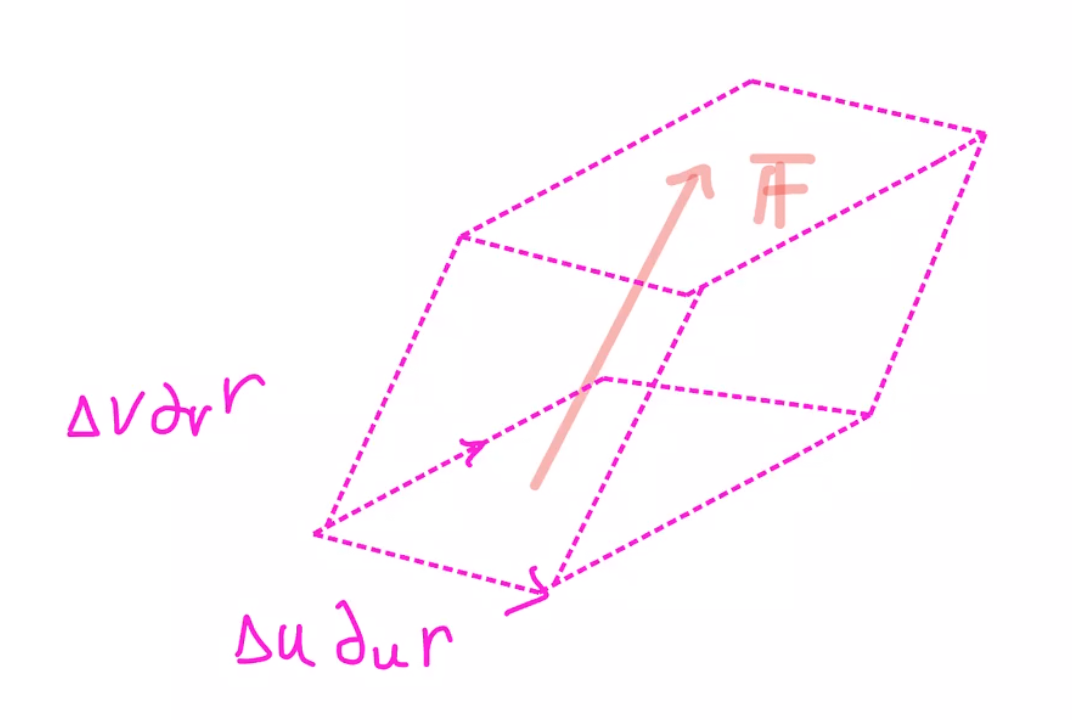
y \(\Delta v \partial_v \mathbb{r}\) colocado sobre el plano tangente de \(\mathcal{S}\). Si queremos
ver el flujo a través de \(\mathbb{R}_{i,j}\) consideramos el paralelepipedo formado por los vectores
\(\Delta u \partial_u \mathbb{r}(p_{i,j}), \Delta v \partial_v \mathbb{r}(p_{i,j})\) y \(\mathbb{F}(\mathbb{r}(p_{i,j}))\)
donde \(p_{i,j}\in \mathcal{R}\) es un punto arbitrario. El volumen
de dicho paralelepipedo está dado por el triple producto
\[
\mathbb{F}(\mathbb{r}(p_{i,j})) \cdot (\Delta u \partial_u \mathbb{r}(p_{i,j}) \times \Delta v \partial_v \mathbb{r}(p_{i,j}))=\mathbb{F}(\mathbb{r}(p_{i,j}))\cdot (\partial_u\mathbb{r}(p_{i,j})\times \partial_v \mathbb{r}(p_{i,j}))\Delta u \Delta v
\]
Nota.
El vector \(\partial_u \mathbb{r}\times \partial_v \mathbb{r}\) es perpendicular a la superficie
y si pensamos que "apunta hacia afuera de la superficie" tenemos dos casos:
si \(\mathbb{F}\) "apunta hacia afuera de la superficie" el producto
\(\mathbb{F}\cdot (\partial_u \mathbb{r}\times \partial_v \mathbb{r})\)
es positivo y podemos pensar que el flujo sale de la superficie.
si \(\mathbb{F}\) "apunta hacia dentro de la superficie" el producto
\(\mathbb{F}\cdot (\partial_u \mathbb{r}\times \partial_v \mathbb{r})\)
es negativo y podemos pensar que el flujo entra a la superficie.
Por lo tanto la suma
\[
\sum_{i,j=1}^n \mathbb{F}(\mathbb{r}(p_{i,j}))\cdot (\partial_u\mathbb{r}(p_{i,j})\times \partial_v \mathbb{r}(p_{i,j}))\Delta u \Delta v
\]
es la cantidad neta del flujo que pasa por la superficie \(\mathcal{S}\).
Tomando el límite cuando \(n\to \infty\) tenemos que
\[
\sum_{i,j=1}^n \mathbb{F}(\mathbb{r}(p_{i,j}))\cdot (\partial_u\mathbb{r}(p_{i,j})\times \partial_v \mathbb{r}(p_{i,j}))\Delta u \Delta v
\to \int_{\mathcal{R}} \mathbb{F}(\mathbb{r}(u,v))\cdot (\partial_u \mathbb{r}(u,v)\times \mathbb{r}_v(u,v))du\otimes dv
\]
Definición
Integral de superficie
Sea \(\mathcal{S} \subset \mathbb{R}^3\) una superficie parametrizada suave
y sea \(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\) una parametrización clase
\(C^1\) de \(\mathcal{S}\).
Sea \(\mathbb{F}:\mathcal{S} \to \mathbb{R}^3\) un campo vectorial continua en \(\mathcal{S}\).
Definimos la integral de superficie de \(\mathbb{F}\) sobre \(\mathcal{S}\) como
\[
\int_{\mathcal{S}} \mathbb{F}\cdot d\mathcal{S}=\int_{\mathcal{R}} \mathbb{F}(\mathbb{r}(u,v))\cdot (\partial_u\mathbb{r}\times \partial_v\mathbb{r})(u,v)du\otimes dv
\]
también se puede denotar \(\int_{\mathbb{r} } \mathbb{F}\cdot d\mathbb{r}\).
Nota.
Ya que el integrando es el producto punto \(\mathbb{F}\cdot (\partial_u\mathbb{r} \times \partial_v \mathbb{r})\),
al calcular la integral de línea se puede pensar que, en cada punto de la superficie,
proyectamos el campo \(\mathbb{F}\) sobre el vector normal a la superficie \(\partial_u\mathbb{r} \times \partial_v \mathbb{r}\),
y después hacemos un promedio.
Ejercicio
Por \(\mathcal{S}\) denotamos la superficie cuya frontera está formada
por los vértices del triángulo \((a,0,0),(0,a,0),(0,0,a)\) donde \(a>0\).
Sea \(\mathbb{F}(x,y,z)=(x,y,z)\).Calcula
\(\int_{\mathcal{S}} \mathbb{F}\cdot d\mathcal{S}\) usando:
la pareametrización \(\mathbb{r}(u,v)=(a(u+v),a(u-v),a(1-2u))\),
una representación explícita de la forma \(z=f(x,y)\).
Ejercicio
Por \(\mathcal{S}\) denotamos el hemosferio de la esfera de radio \(a\) dado por
\(x^2+y^2+z^2=a^2, z\geq 0\). Sea \(\mathbb{F}(x,y,z)=(x,y,0)\). Calcula
\(\int_{\mathcal{S}} \mathbb{F}\cdot d\mathcal{S}\) usando:
la pareametrización \(\mathbb{r}(u,v)=a(\sen(u)\cos(v),\sen(u)\sen(v),\cos(u))\),
la representación explícita \(z=\sqrt{a^2-x^2-y^2}\).
Definición
Orientación
Sea \(\mathcal{S}\subset \mathbb{R}^3\) una superficie suave parametrizada.
Una orientación para \(\mathcal{S}\) es simplemente
una función \(N:\mathcal{S}\to \mathbb{R}^3\) tal que:
\(N\) es continua en todo \(\mathcal{S}\),
para todo punto \(p \in \mathcal{S}\), \(\|N(p)\|=1\),
para todo punto \(p\in \mathcal{S}\), \(N(p)\) es perpendicular al plano tangente en \(p\).
Superficie orientable
Una superficie suave parametrizada se llama orientable si admite una función
orientación.
Ejemplo.
La esfera \(\mathcal{S}=\{(x,y,z): x^2+y^2+z^2=1\}\) es una superficie orientable pues
la función \(N(x,y,z)=(x,y,z)\) satisface:
es continua,
\(\|N(x,y,z)\|=1\) para todo \((x,y,z)\in \mathcal{S}\),
\(N(x,y,z)=(x,y,z)\) es perpendicular al plano tangente a \(\mathcal{S}\)
en \((x,y,z)\) (pues los radios son perpendiculares al plano tangente).
Por lo tanto \(N\) es una orientación de la esfera.
No ejemplo.
La banda de Møbius no es orientable. La idea para probarlo es suponer que sí es
orientable, digamos que \(N\) es una orientación, y mover el vector \(N(p)\)
sobre la superficie dando una vuelta completa notando que al regresar al inicio
el vetor \(N(p)\) apunta en sentido contrario.
Nota.
Determinar si una superficie es orientable o no es un problema en sí mismo. Como el
ejemplo de la banda de Møbius muestra la orientabilidad es una propiedad global
de la superficie es decir es una propiedad que toma en cuenta toda la forma de la superficie.
Ejercicio
Sea \(\mathcal{S}\subset \mathbb{R}^3\) una superficie suave parametrizada y supongamos que
existe una parametrización clase \(C^1\) de \(\mathcal{S}\),
\(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\) con la característica que su
producto fundamental
nunca se anula:
\[
(\partial_u \mathbb{r}\times \partial_v\mathbb{r})(p)\ne 0, \quad \forall p\in \mathcal{R}
\]
Prueba que \(\mathcal{S}\) es orientable, es más existen sólo dos funciones
orientación para \(\mathcal{S}\).
Recordando que el producto fundamental es perpendicular al plano tangente se sigue que el vector
\[
\mathbb{n}:=\frac{1}{\|\partial_u \mathbb{r}\times \partial_v\mathbb{r} \|}\partial_u \mathbb{r}\times \partial_v\mathbb{r}
\]
es un vector normal unitario a la superficiie y además es una función continua.
Por lo tanto \(N=\mathbb{n}\) es una función orientación para \(\mathcal{S}\). Además
es claro que la función \(N=-\mathbb{n}\) es otra función orientación para \(\mathcal{S}\).
Finalmente si \(N:\mathcal{S}\to \mathbb{R}^3\) es una función orientación, ya que
\(N\) es perpendicular al plano tangente tenemos que
\(N=\lambda \mathbb{n}\) donde \(\lambda \in \mathbb{R}\), pero como
\(\|N\|=1\) y \(\| \mathbb{n}\|=1\) resulta que \(\lambda =1\) ó
\(\lambda=-1\). Finalmente como \(N\) y \(\mathbb{n}\) son continuas,
\(\lambda\) debe ser una función continua por lo que
\(\lambda\) es la función constante \(1\) ó \(-1\). Concluyendo que sólo tenemos dos
posibilidades:
\[
N=\mathbb{n}, \quad N=-\mathbb{n}.
\]
Ejercicio
Sea \(D\subset \mathbb{R}^2\) un subconunto compacto con interior no vacío,
\(U\subseteq \mathbb{R}^2\) un subconjunto abierto y
\(f:U \to \mathbb{R}\) una función clase \(C^1\) en \(U\).
Prueba que la gráfica de \(f\) restringida a \(D\):
\[
\mathcal{S}=\{(x,y,f(x,y)): (x,y)\in D\}
\]
es una superficie orientable.
Ejercicio
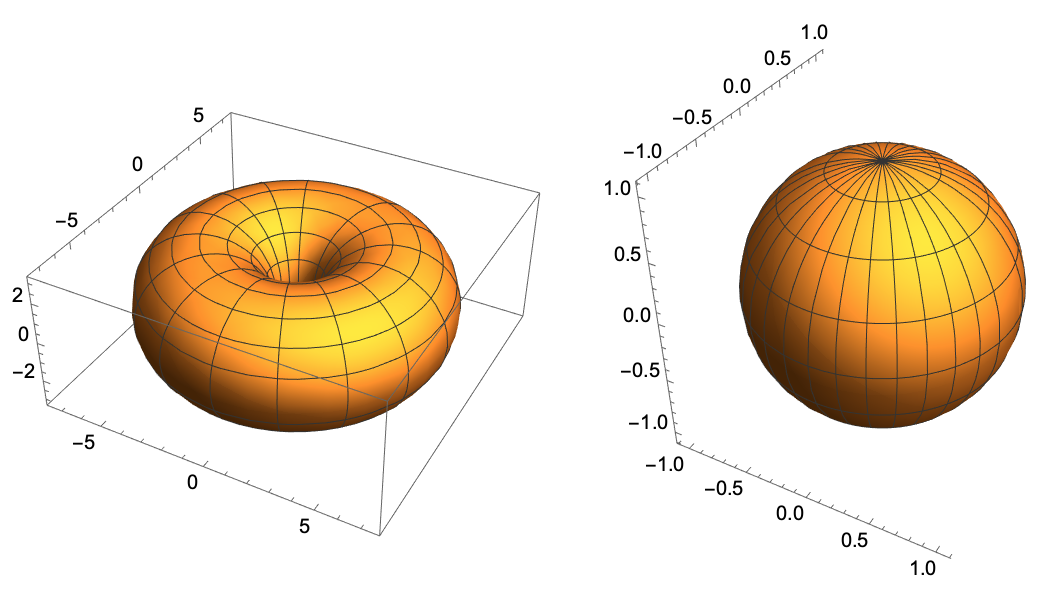
Prueba que las siguientes superficies parametrizadas son orientables y calcula las dos posibles orientaciones.
Esfera: \(\mathbb{r}(u,v)=(r\cos(v)\sin(u), r\sin(v)\sin(u), r\cos(u))\),
donde \(r>0\) es el radio.
Paraboloide elíptico: \(\mathbb{r}(u,v)=(a u \cos(v),bu\sin(v), u^2)\)
donde \(a,b >0\) son constantes.
Elipsoide: \(\mathbb{r}(u,v)=(a\sin(u)\cos(v), b\sin(u)\sin(v), c \cos(u))\),
donde \(a,b,c>0\).
Superficie de revolución: \(\mathbb{r}(u,v)=(u\cos(v), u\sin(v), f(u))\),
donde \(f\) es una función de una variable con \(f \geq 0\).
Toro: \(\mathbb{r}(u,v)=((a+b\cos(u))\sin(v), (a+b\cos(u))\cos(v), b\sin(u))\),
donde \(a,b >0\).
Definición
Dos funciones clase \(C^1\), \(\mathbb{r}_1:\mathcal{R}_1 \to \mathbb{R}^3\),
\(\mathbb{r}_2:\mathcal{R}_2 \to \mathbb{R}^3\), se llaman equivalentes si
existe una función \(T:\mathcal{R}_1 \to \mathbb{R}^3\) tal que
\(T\) es clase \(C^1\) en \(\mathcal{R}_1\),
\(T(\mathcal{R}_1)=\mathcal{R}_2\),
la matriz de derivadas parciales, \(D_pT\), cumple que su determinante no se anula para todo \(p\in \mathcal{R}_1\),
para todo \(p\in \mathcal{R}_1\), \(\mathbb{r}_2(T(p))=\mathbb{r}_1(p)\).
Nota.
Es útil pensar a las funciones \(\mathbb{r}_1\) y \(\mathbb{r}_2\) como funciones coordenadas. En este
contexto la transformación \(T\) es simplemente un cambio de coordenadas.
Decimos que \(\mathbb{r}_1\) y \(\mathbb{r}_2\) tienen la misma orientación si
\(\det(D_pT)>0\) para todo \(p\) y decimos que tienen orientaciones contrarias si
\(\det(D_pT)< 0\) para todo \(p\).
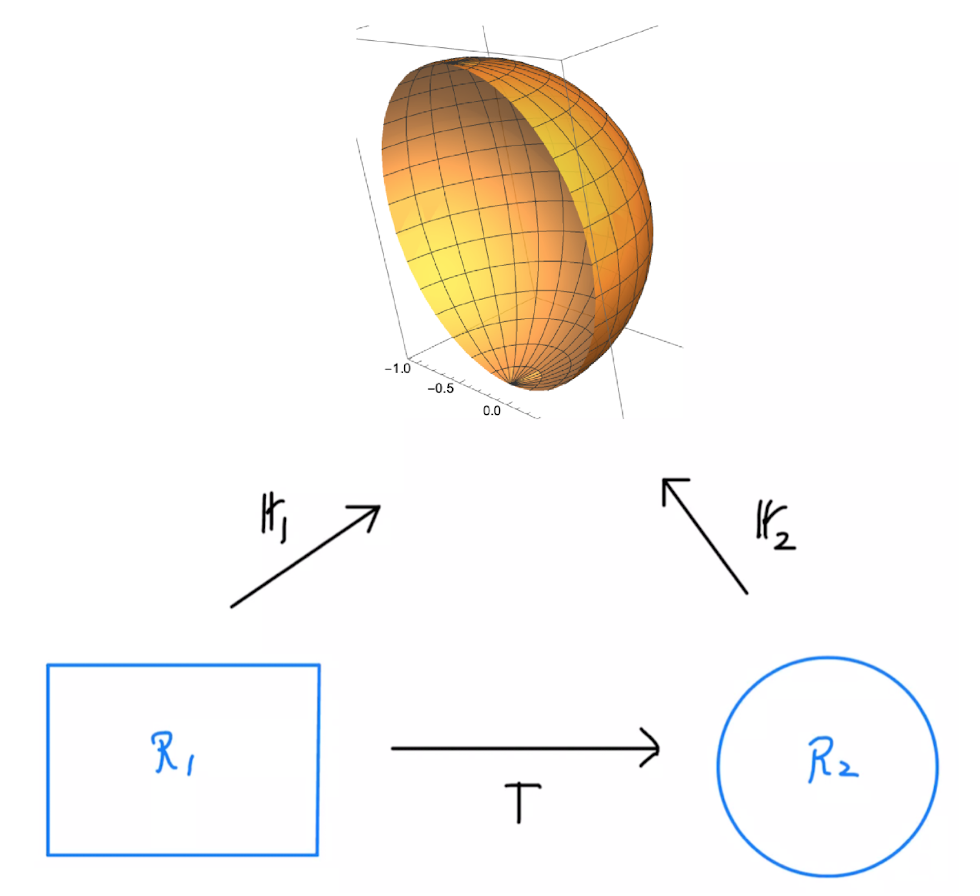
Por ejemplo, para el hemisferio
\[
\mathcal{S}=\{(x,y,z): x^2+y^2+z^2=1, y \geq 0\}
\]
tenemos dos parametrizaciones
\begin{eqnarray*}
& \mathbb{r}_1 & :\mathcal{R}_1 \to \mathbb{R}^3,\\
\mathbb{r}_1(u,v)&=&(\sen(u)\cos(v),\sen(u)\sen(v),\cos(u)),\\
& \mathbb{r}_2 &:\mathcal{R}_2 \to \mathbb{R}^3,\\
\mathbb{r}_2(x,z)&=&(x,\sqrt{1-x^2-z^2},z),
\end{eqnarray*}
con \(\mathcal{R}_1=[0,\pi]\times [0,\pi], \mathcal{R}_2=\{(x,z):x^2+z^2\leq 1 \}\). La
función \(T(u,v)=(\sen(u)\cos(v),\cos(u))\), muestra que las parametrizaciones son equivalentes.
Lema
Sean \(A,B\) matrices de \(3\times 2\) y \(C\) una matriz de
\(2\times 2\). Por \(A_1,A_2\) denotamos las
columnas de \(A\) y de manera similar lo hacemos con \(B\). Si se tiene la relación
\[
B=AC
\]
entonces
\[
(B_1\times B_2)=\det(C)(A_1\times A_2)
\]
Teorema
Sea \(\mathcal{S}\) una superficie suave parametrizada y sean
\(\mathbb{r}_i:\mathcal{R}\to \mathbb{R}^3\),\(i=1,2\), dos parametrizaciones equivalentes de
\(\mathcal{S}\) clase \(C^1\).
Sea \(\mathbb{F}:\mathcal{S}\to \mathbb{R}^3\) un campo vectorial continuo.
Si \(\mathbb{r}_1\) y \(\mathbb{r}_2\) tienen la misma orientación entonces
\[
\int_{\mathbb{r}_1}\mathbb{F}\cdot d \mathbb{r}_1=\int_{\mathbb{r}_2}\mathbb{F}\cdot d \mathbb{r}_2
\]
Si \(\mathbb{r}_1\) y \(\mathbb{r}_2\) tienen orientaciones contrarias entonces
\[
\int_{\mathbb{r}_1}\mathbb{F}\cdot d \mathbb{r}_1=-\int_{\mathbb{r}_2}\mathbb{F}\cdot d \mathbb{r}_2
\]
Al ser \(\mathbb{r}_1\) y \(\mathbb{r}_2\) equivalentes existe \(T:\mathcal{R}_1 \to \mathbb{R}^2\)
función clase \(C^1\) tal que \(T(\mathcal{R}_1)=\mathcal{R}_2\), \(\mathbb{r}_2\circ T = \mathbb{r}_1\) y la matriz de derivadas
parciales \(D_pT\) tiene determinante que nunca se anula.
La idea es ir modificando la integral \(\int_{\mathbb{r}_1}\mathbb{F}\cdot d\mathbb{r}_1\)
hasta obtener \(\int_{\mathbb{r}_2}\mathbb{F}\cdot d\mathbb{r}_2\) ó
\(-\int_{\mathbb{r}_2}\mathbb{F}\cdot d\mathbb{r}_2\), según sea la orientación.
Usando \(\mathbb{r}_1=\mathbb{r}_2\circ T \) tenemos que
\begin{eqnarray*}
\int_{\mathbb{r}_1} \mathbb{F}\cdot \mathbb{r}_1
&=& \int_{\mathcal{R}_1}\mathbb{F}(\mathbb{r}_1(u,v))\cdot (\partial_u \mathbb{r}_1 \times \partial_v\mathbb{r}_1)(u,v)du\otimes dv \\
&=& \int_{\mathcal{R}_1}\mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_1 \times \mathbb{r}_1)(u,v)du\otimes dv
\end{eqnarray*}
Caso 1: \(T\) preserva la orientación.
En este caso debemos de probar
\begin{eqnarray}
& & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_1 \times \partial_v \mathbb{r}_1)(u,v)du\otimes dv \nonumber\\
&=&
\int_{\mathcal{R}_2} \mathbb{F}(\mathbb{r}_2(u,v))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(u,v)du\otimes dv \label{Eqn:Aux2ReparametrizacionSup}
\end{eqnarray}
lo cual empieza a tener cara de que podemos aplicar el
Teorema del Cambio de Variable pero
necesitamos encontrar la relación entre
\((\partial_u \mathbb{r}_1 \times \partial_v \mathbb{r}_1)(u,v)\)
y \((\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(u,v)\). Para
encontrar la relación anterior usamos la regla de la cadena.
Usando \(\mathbb{r}_2\circ T=\mathbb{r}_1\) y la regla de la cadena obtenemos
que para todo \(p=(u,v)\in \mathcal{R}_1\):
\begin{equation}\label{Eqn:Aux1ReparametrizacionSup}
(D_{T(p)}\mathbb{r}_2)(D_pT)=D_{p}\mathbb{r}_1
\end{equation}
donde el lado izquierdo es multiplicación de matrices.
Redordando cómo se obtiene la matriz de darivadas parciales tenemos que
\[
D_p\mathbb{r}_1=[ \partial_u \mathbb{r}_1(p), \partial_v \mathbb{r}_1(p) ]
\]
donde ponemos los vectores \(\partial_u \mathbb{r}_1(p)\) y
\(\partial_v \mathbb{r}_1(p)\) como columnas.
Pero por \eqref{Eqn:Aux1ReparametrizacionSup} y el Lema
obtenemos
\[
(\det D_pT) (\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))=(\partial_u \mathbb{r}_1 \times \partial_v \mathbb{r}_1)(u,v)
\]
substituyendo ésta igualdad obtenemos
\begin{eqnarray*}
& & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u\mathbb{r}_1\times \partial_v\mathbb{r}_1)(u,v)du\otimes dv \\
&= & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))(\det D_pT) du\otimes dv
\end{eqnarray*}
En este punto es donde entra la orientación. Ya que \(T\) preserva la orientación,
\(\det D_pT >0\) para todo \(p=(u,v)\in \mathcal{R}_1\) y por lo tanto el valor absoluto de
su Jacobiano es \(|J_T(u,v)|=|\det D_{p}T|=\det D_pT\) y podemos reescribir
\begin{eqnarray*}
& & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))(\det D_pT) du\otimes dv \\
& =& \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))|J_T(u,v)| du\otimes dv
\end{eqnarray*}
Después de todas las modificaciones concluimos que \eqref{Eqn:Aux2ReparametrizacionSup}
(la ecuación que debemos probar) es equivalente a
\begin{eqnarray*}
& & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))|J_T(u,v)| du\otimes dv \\
&=&\int_{\mathcal{R}_2} \mathbb{F}(\mathbb{r}_2(u,v))\cdot
(\partial_u \mathbb{r}_2\times \partial_v \mathbb{r}_2)(u,v)du\otimes dv
\end{eqnarray*}
la cual es cierta por el Teorema del Cambio de Variable .
Caso 2: \(T\) invierte la orientación.
En este caso
debemos de probar
\begin{eqnarray}
& & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_1 \times \partial_v \mathbb{r}_1)(u,v)du\otimes dv \nonumber\\
&=&
-\int_{\mathcal{R}_2} \mathbb{F}(\mathbb{r}_2(u,v))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(u,v)du\otimes dv \label{Eqn:Aux3ReparametrizacionSup}
\end{eqnarray}
Todo es similar hasta la ecuación
\begin{eqnarray*}
& & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_1 \times \partial_v \mathbb{r}_1)(u,v)du\otimes dv \\
&=& \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))(\det D_pT) du\otimes dv
\end{eqnarray*}
Ya que \(T\) invierte la orientación,
\(\det D_pT < 0\) para todo \(p=(u,v)\in \mathcal{R}_1\) y por lo tanto el valor absoluto de
su Jacobiano es \(|J_T(u,v)|=|\det D_{p}T|=-\det D_pT\) por lo que
\begin{eqnarray*}
& & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))(\det D_pT) du\otimes dv \\
& =- & \int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))|J_T(u,v)| du\otimes dv
\end{eqnarray*}
Después de todas las modificaciones concluimos que \eqref{Eqn:Aux3ReparametrizacionSup}
(la ecuación que debemos probar) es equivalente a
\begin{eqnarray*}
& & -\int_{\mathcal{R}_1} \mathbb{F}(\mathbb{r}_2(T(u,v)))\cdot
(\partial_u \mathbb{r}_2 \times \partial_v \mathbb{r}_2)(T(u,v))|J_T(u,v)| du\otimes dv \\
&=&-\int_{\mathcal{R}_2} \mathbb{F}(\mathbb{r}_2(u,v))\cdot
(\partial_u \mathbb{r}_2\times \partial_v \mathbb{r}_2)(u,v)du\otimes dv
\end{eqnarray*}
la cual es cierta por el Teorema del Cambio de Variable .
Nota
Supongamos que \(\mathbb{S}\) es una superficie suave parametrizada por
la función clase \(C^1\), \(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\). Si escribimos
las funciones coordendas de \(\mathbb{r}\)
\[
\mathbb{r}(u,v)=(X(u,v),Y(u,v),Z(u,v))
\]
entonces
\[
\partial_u\mathbb{r}\times \partial_v\mathbb{r} =\left(\frac{\partial(Y,Z)}{\partial(u,v)},\frac{\partial(Z,X)}{\partial(u,v)},\frac{\partial(X,Y)}{\partial(u,v)}\right)
\]
donde usamos la notación
\begin{eqnarray*}
\frac{\partial(Y,Z)}{\partial(u,v)} =
\det
\left[
\begin{array}{cc}
\partial_u Y & \partial_u Z \\
\partial_v Y & \partial_v Z
\end{array}
\right]\\
\frac{\partial(Z,X)}{\partial(u,v)} =
\det
\left[
\begin{array}{cc}
\partial_u Z & \partial_u X \\
\partial_v Z & \partial_v X
\end{array}
\right]\\
\frac{\partial(X,Y)}{\partial(u,v)} =
\det
\left[
\begin{array}{cc}
\partial_u X & \partial_u Y \\
\partial_v X & \partial_v Y
\end{array}
\right]
\end{eqnarray*}
Por lo tanto, si el campo tiene funciones coordenadas \(\mathbb{F}=(P,Q,R)\) entonces
\begin{eqnarray*}
\int_{\mathbb{r}}\mathbb{F}\cdot d\mathbb{r}&=&\int_{\mathcal{R}}P(\mathbb{r}(u,v))\frac{\partial(Y,Z)}{\partial(u,v)}du\otimes dv \\
&+&\int_{\mathcal{R}}Q(\mathbb{r}(u,v)) \frac{\partial(Z,X)}{\partial(u,v)}du\otimes dv \\
&+& \int_{\mathcal{R}}R(\mathbb{r}(u,v)) \frac{\partial(X,Y)}{\partial(u,v)}du\otimes dv \\
\end{eqnarray*}
Por simplicidad denotamos
\begin{eqnarray*}
\int_{\mathcal{S}} P(x,y,z)dy\wedge dz &=& \int_{\mathcal{R}}P(\mathbb{r}(u,v))\frac{\partial(Y,Z)}{\partial(u,v)}du\otimes dv \\
\int_{\mathcal{S}} Q(x,y,z)dz\wedge dx &=& \int_{\mathcal{R}}Q(\mathbb{r}(u,v))\frac{\partial(Z,X)}{\partial(u,v)}du\otimes dv \\
\int_{\mathcal{S}} R(x,y,z)dx\wedge dy &=& \int_{\mathcal{R}}R(\mathbb{r}(u,v))\frac{\partial(X,Y)}{\partial(u,v)}du\otimes dv \\
\end{eqnarray*}
y entonces podemos escribir con esta notación
\[
\int_{\mathcal{S}}\mathbb{F}\cdot d\mathcal{S}=\int_{\mathcal{S}} Pdy\wedge dz+Q dz\wedge dx + R dx\wedge dy
\]
Ejercicio
Calcula
\[
\int_{\mathcal{S}} xdx\wedge dy +ydy\wedge dz +zdx\wedge dz
\]
donde \(\mathcal{S}\) es la región triangular
con vértices \((1,0,0), (0,0,1)\) y \((0,0,1)\)
y vector normal con componente \(z >0\).
Calcula
\[
\int_{\mathcal{S}} x^2 dx\wedge dy +xz dy\wedge dz - yz dx\wedge dz
\]
donde \(\mathcal{S}\) es la esfera \(x^2+y^2+y^2=r^2\), con vector
normal apuntando hacia afuera.
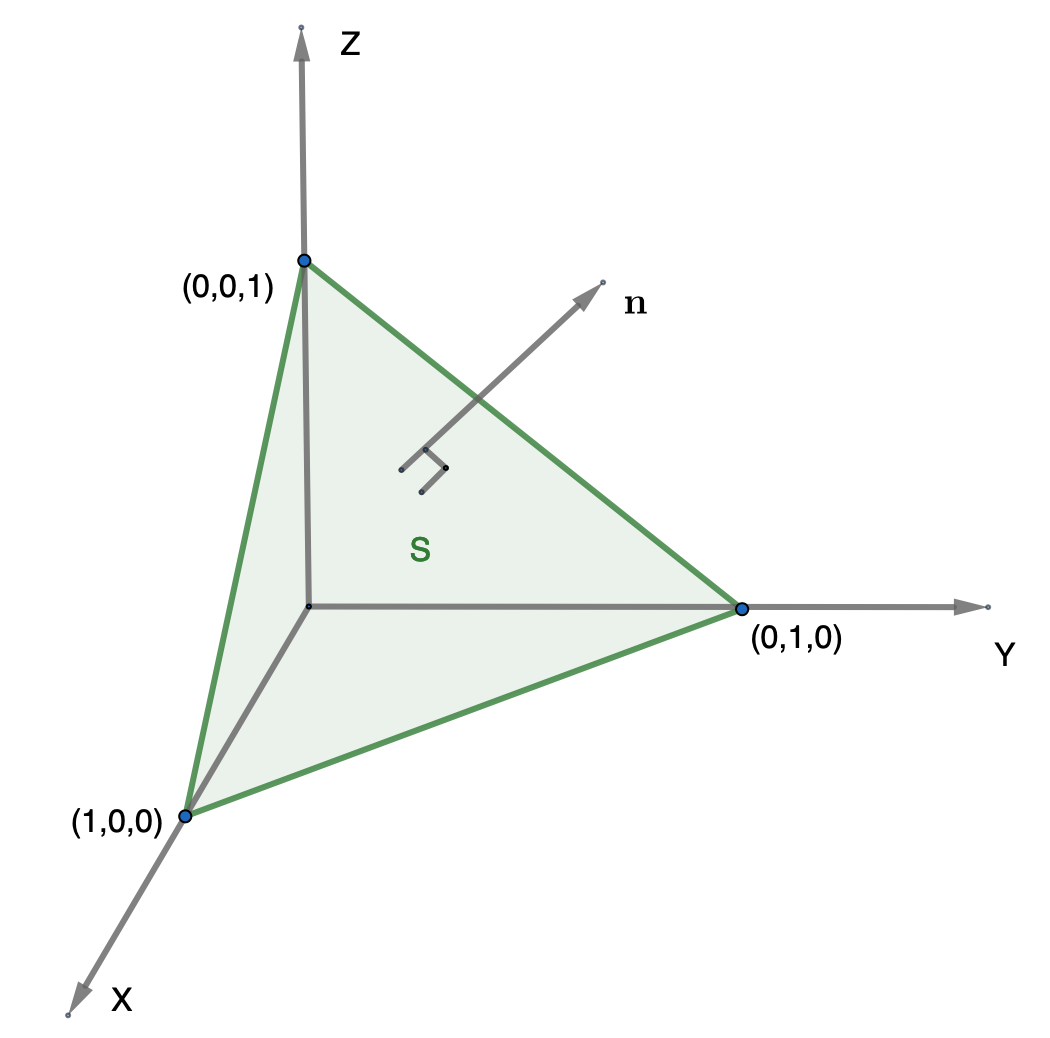
Primero parametricemos la región \(S\). Graficamente
\(S\) es de la forma,
Tenemos que la ecuación del plano que contiene a la región
\(S\) es \(\textbf{n}\cdot((x, y, z) - p_0) = 0\)
donde \(p_0\) es un punto del plano
(a saber \(p_0 = (1,0,0)\)) y \(\textbf{n}\) es el vector normal
del plano que apunta hacia afuera, entonces
\(\textbf{n} = v_1 \times v_2 \) donde
\(v_1 = (0, 1, 0) - (1, 0, 0) \) y
\(v_2 = (0, 0, 1) - (1, 0, 0) \), es decir,
\(v_1 = (-1, 1, 0)\) y \(v_2 = (-1, 0, 1). \).
Por lo tanto, \(\textbf{n} = (1, 1, 1) \) y la ecuación del
plano es de la forma \(z = 1 -x -y\).
Lo siguiente es proyectar los puntos de la región \(S\) en el plano
\(XY\), a dicha región la denotamos por \(R\), podemos considerar
\(R \subseteq \mathbb{R}^2\) la cual está delimitada por
\(x \in[0, 1]\) y \(0 \leq y \leq 1 -x\), es decir,
\[
R = \lbrace (x, y) \in \mathbb{R}^2 :
x\in [0, 1], 0 \leq y \leq 1 -x \rbrace.
\]
Por lo tanto, la parametrización de la región \(S\) es de la
forma \(\mathbb{r} : R \subseteq \mathbb{R}^2 \rightarrow
S \subseteq \mathbb{R}^3 \)
dada por
\(\mathbb{r}(u, v) = (x(u, v), y(u,v), z(u,v))
= (u, v, 1 -u -v)\)
para \((u,v) \in R\), esto implica que
\( \partial_u\mathbb{r} = (1, 0, -1) \) y
\(\partial_v\mathbb{r} = (0, 1, -1). \).
Además
\begin{eqnarray*}
\frac{\partial(x, y)}{\partial(u, v)}
&=& \det \left[\begin{array}{cccc}
1 & 0 \\
0 & 1
\end{array} \right] = 1,\\
\frac{\partial(y, z)}{\partial(u, v)}
&=& \det \left[\begin{array}{cccc}
0 & 1 \\
-1 & -1
\end{array} \right] = 1,
\\
\frac{\partial(x, z)}{\partial(u, v)}
&=& \det \left[\begin{array}{cccc}
1 & 0 \\
-1 & -1
\end{array} \right] = -1.
\end{eqnarray*}
Tenemos que
\begin{eqnarray*}
\int_S x dx\wedge dy + ydy\wedge dz + z dx\wedge dz & = &
\int_R u \frac{\partial(x, y)}{\partial(u, v)} \\
&+& \int_R v \frac{\partial(y, z)}{\partial(u, v)} \\
&+& \int_R (1 -u -v) \frac{\partial(x, z)}{\partial(u, v)} \\
& = & \int_R u dA \\
&+& \int_R v dA \\
&+& \int_R (u + v -1) dA
\end{eqnarray*}
Como \( \int_R (u + v -1) dA =
\int_R u dA + \int_R v dA - \int_R 1dA \) y
\( \int_R 1dA = A(R) = \frac{1}{2}\). Entonces tenemos
\begin{eqnarray*}
\int_R u dA + \int_R v dA + \int_R (u + v -1) dA
& = & 2\int_R u dA + 2\int_R v dA - \frac{1}{2}
\end{eqnarray*}
donde,
\[
\int_R u dA = \int_0^1\left(\int_0^{1-u}u dv\right)du
= \int_0^1 u(1-u) du = \frac{1}{2} - \frac{1}{3}.
\]
y
\[
\int_R v dA = \int_0^{1}\left(\int_0^{1-u}v dv\right)du
= \int_0^1 \frac{(1 - u)^2}{2} du = \frac{1}{6}.
\]
Entonces,
\[
2\int_R u dA + 2\int_R v dA - \frac{1}{2} =
2\left(\frac{1}{2} - \frac{1}{3}\right) + \frac{1}{3}
- \frac{1}{2} = \frac{1}{6} .
\]
Por lo tanto,
\[
\int_S x dx\wedge dy + ydy\wedge dz + z dx\wedge dz
= \frac{1}{6}.
\]
Ejercicio
Sea \(\mathcal{S}\) la superficie determinada por la gráfica
de una función de clase \(C^1\), \(f\). Es decir, una parametrización
de \(\mathcal{S}\) es \(\mathbb{r}(x,y)=(x,y,f(x,y))\),
donde \((x,y)\in \mathcal{R}\), \(\mathcal{R}\subset \mathbb{R}^2\)
es una región y \(f:\mathcal{R}\to \mathbb{R}\) es una función clase \(C^1\).
Sea \(\varphi: U \to \mathbb{R}\) continua en
\(U\), donde \(U\subset \mathbb{R}^3\) es tal que \(\mathcal{S}\subset U\).
Usa la parametrización anterior para probar
\[
\int_{\mathcal{S}}\varphi dx\wedge dy = \int_{\mathcal{R}}\varphi(x,y,f(x,y))dxdy
\]
Sea \(\mathcal{S}\) una supreficie con la característica que admite una
parametrización \(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\)
con las propiedades de que
\(\partial R\) es una curva de Jordan,
\(\mathbb{r}(\partial \mathcal{R})\)
sea una curva suave a trozos.
En este caso decimos que \(\mathcal{S}\)
es una superficie con frontera, denotada \(\partial \mathcal{S}\), la cual se define como
\(\partial \mathcal{S}=\mathbb{r}(\partial \mathcal{R})\).
Ejemplo
En el caso del hemisferio
\[
\mathcal{S}=\{(x,y,z): x^2+y^2+z^2=r^2, y \geq 0\}
\]
la parametrización
\begin{eqnarray*}
& & \mathbb{r}:[0,\pi]\times [0,\pi]\to \mathbb{R}^3,\\
& & \mathbb{r}(\theta,\varphi)=(r\cos(\varphi)\sin(\theta), r\sin(\varphi)\sin(\theta), r\cos(\theta)).
\end{eqnarray*}
tiene la propiedad de que
\[
\mathbb{r}(\partial ([0,\pi]\times [0,\pi]))
= \{(x,y,z): y=0, x^2+z^2=r^2\}
\]
Por lo tanto
\[
\partial \mathcal{S}=\{(x,y,z): y=0, x^2+z^2=r^2\}.
\]
Intuitivamente la frontera es la "orilla" de la superficie. Otra forma de pensar la frontera es
como los puntos donde se pierde una dirección en movimiento.
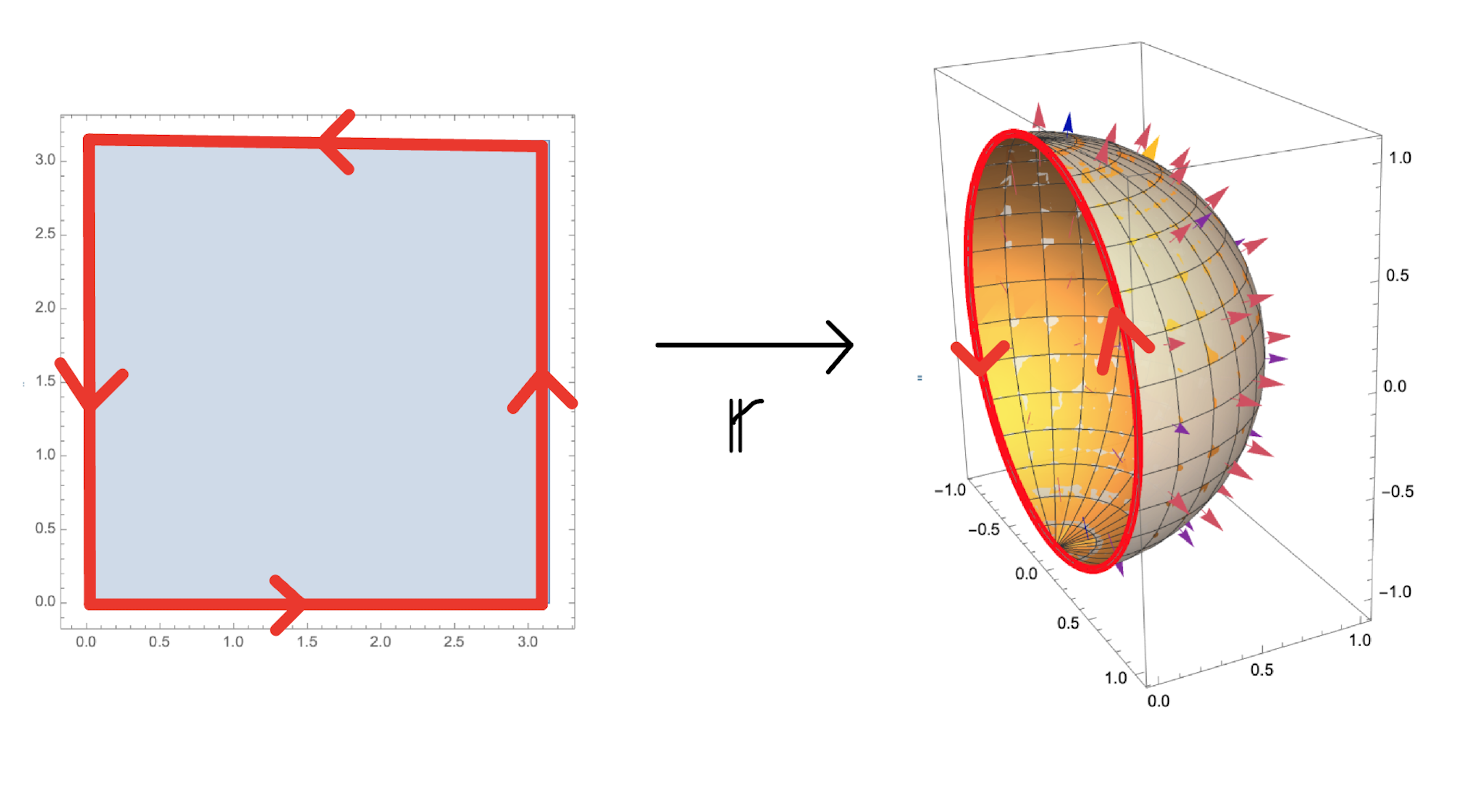
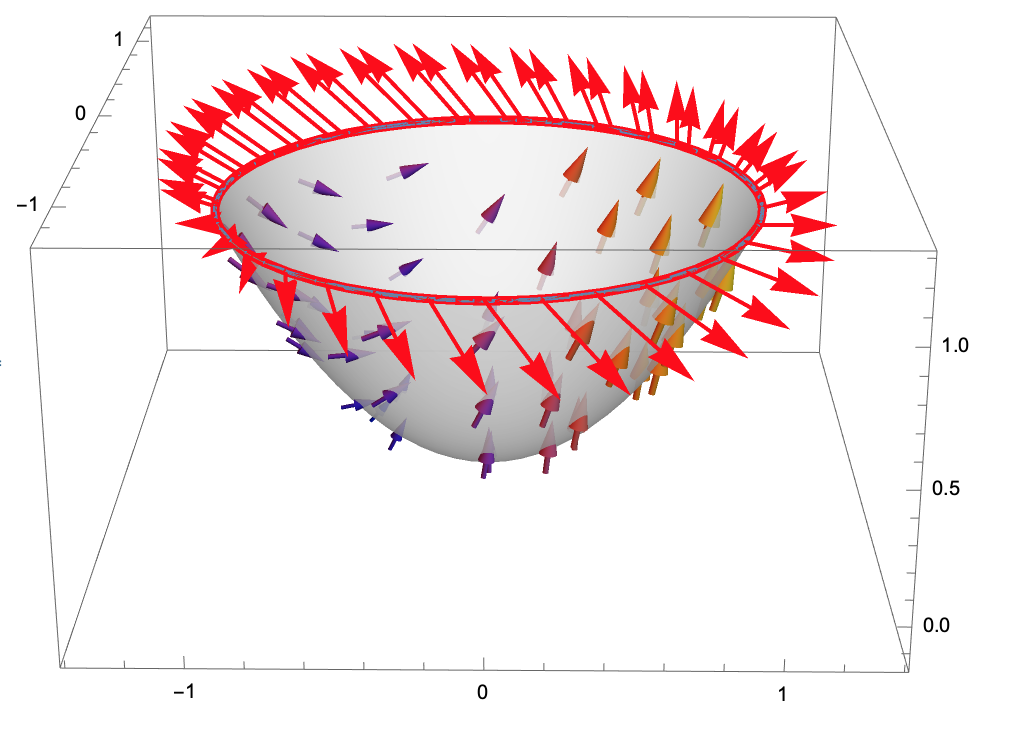
Orientación
Si \(\mathcal{S}\) es una superficie orientada, con orientación dada por
la parametrización \(\mathbb{r}\), ésta induce una orientación en la
frontera \(\partial \mathcal{S}\) simplemente tomando la orientación
de \(\mathbb{r}(\partial \mathcal{R})\) tomando a \(\mathcal{R}\)
con orientación positiva. En otras palabras, la misma parametrización
contiene la información para orientar la frontera.
Superficie cerrada
Si \(\mathbb{r}(\partial \mathcal{R})\) es un punto decimos que la superficie es cerrada
(como en el caso de la esfera con la parametrización dada por las coordenadas esféricas).
Intuitivamente en una superficie cerrada, estando en cualquier punto uno se puede mover en toda
dirección manteniendose siempre en la superficie.
Teorema de Stokes
Sea \(\mathcal{S}\subset \mathbb{R}^3\)
una:
superficie suave,
orientable,
con frontera,
Sea \(U\subset \mathbb{R}^3\) un conjunto abierto con \(\mathcal{S}\subset U\)
y sea \(\mathbb{F}= (A,B, C):U \to \mathbb{R}^3\) un campo vectorial clase \(C^1\) en \(U\).
Entonces
\begin{eqnarray*}
\int_{\partial \mathcal{S}} A dx + Bdy+Cd&=&\int_{\mathcal{S}} (\partial_xB-\partial_yA)dx\wedge dy \\
&+& \int_{\mathcal{S}}(\partial_y C - \partial_zB)dy\wedge dz\\
&+& \int_{\mathcal{S}}(\partial_zA-\partial_xC)dz\wedge dx
\end{eqnarray*}
donde \(\partial S\) tiene la orientación inducida por \(\mathcal{S}\)
utilizando la regla de la mano izquierda.
Usando el rotacional podemos reescribir el teorema como
\[
\int_{\partial S} \mathbb{F}\cdot d\partial S= \int_S (\nabla \times \mathbb{F})\cdot dS
\]
Notas.
Durante la prueba vamos a suponer que \(S\) está parametrizada por
una función \(r:\mathcal{S}\to \mathbb{R}^3\), clase \(C^2\), inyectiva. Estas condiciónes
no son necesarias para la validez del teorema pero la vamos a necesitar para dar una
demostración.
El teorema sigue siendo cierto si la superficie \(\mathcal{S}\) se cambia de suave a
suave a trozos (por ejemplo 5 caras de un cubo) o si \(\partial S\) es una unión de curvas suaves a trozos
(por ejemplo la mitad de un toro).
Usa el Teorema de Stokes para calcular la integral
de superficie, \(\int_{\mathcal{S}} (\nabla\times \mathbb{F})\cdot d\mathcal{S}\).
\(\mathcal{S}\) es la semi-esfera \(x^2+y^2+z^2 =1\), \(z\geq 0\),
con vector normal apuntando hacia afuera y
\(\mathbb{F}= (y^3x,x^2y, xz) \).
\(\mathcal{S}\) consiste en las cinco caras del cubo
\(0\leq x \leq a, 0\leq y \leq a, 0 \leq z \leq a\), donde
\(a>0\), con vector normal apuntando hacia afuera y
\(\mathbb{F}= (xy-z, yz, x^2-y^2) \).
\(\mathcal{S}\) consiste de las tres caras del tetrahedro,
que no están sobre el plano \(xz\), determinado por
los tres planos coordenados y el plano \(2x+y+5z=5\), con
vector normal apuntando hacia afuera del tetrahedro y
\(\mathbb{F}=(xy^2, x-z, x^2y-z)\).
\(\mathcal{S}\) es la mitad del elipsoide \(4x^2+y^2+4z^2=4\) con
\(y\geq 0\) orientada con el vector normal apuntando hacia afuera y
\(\mathbb{F}=(e^{xy},e^{xz},x^2z)\).
Ejercicio
Sea \(\mathcal{R}\subset \mathbb{R}^2\) una región orientada y
\(\mathbb{T}:U \to \mathbb{R}^2\) un campo vectorial,
clase \(C^1\) en \(U\), donde \(U\) es un abierto de
\(\mathbb{R}^2\) que contiene a \(\mathcal{R}\).
Denotamos \(\mathbb{T}(u,v)=(X(u,v),Y(u,v))\) y
supongamos que el Jacobiano de \(\mathbb{T}\), denotado
\[
\frac{\partial(X,Y)}{\partial(u,v)}:=
\det\left[
\begin{array}{cc}
\partial_uX & \partial_v X \\
\partial_u Y & \partial_v Y
\end{array}
\right]
\]
nunca se anula en \(\mathcal{R}\).
Aplicando el Teorema de la Función Inversa se puede probar que,
bajo estas suposiciones \(\tilde{\mathcal{R}}:=\mathbb{T}(\mathcal{S})\)
es una región.
Prueba que
\[
\int_{\tilde{\mathcal{R}}}1 dx\wedge dy=\int_{\mathcal{R}}\frac{\partial(X,Y)}{\partial(u,v)} du\wedge dv
\]
Area superficial
El ejercicio anterior nos dice que, para una
función de dos variable \(T(u,v)=(X(u,v), Y(u,v))\). la expresión
\(\frac{\partial(X,Y)}{\partial(u,v)}\) mide cuanto la transformación
\(T\) deforma el área de la región \(\mathbb{R}\).
Para una parametrización
\(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\), podemos usar de nuevo
el producto fundamental para ver cómo \(\mathbb{r}\) transforma el
área de \(\mathcal{R}\).
Recordemos que, en general, la norma del producto cruz de dos vectores
\(P\) y \(Q\) es igual al área del paralelogramo generado \(P\) y \(Q\). Ahora,
fijemos \(\mathbb{r}(u_0,v_0)\) en la superficie. Ya que el plano tangente
es el mejor plano que aproxima a la superficie y tomando en cuenta de que
\(\{\partial_u \mathbb{r}(u_0,v_0),\partial_v \mathbb{r}(u_0,v_0)\}\)
forma una base para dicho espacio, tomando \(P=\partial_u \mathbb{r}(u_0,v_0)\)
y \(Q=\partial_u \mathbb{r}(u_0,v_0)\), resulta que
\[
\|\partial_u \mathbb{r}(u_0,v_0)\times \partial_v \mathbb{r}(u_0,v_0) \|
\]
de una medida de qué tanto el área de \(\mathcal{R}\) se deforma para
dar el área de la sufercie. Tomando en cuenta esto, tenemos la siguiente
definición.
Integral con respecto al área
Así como tenemos la integral con respecto a longitud de arco
existe una versión 2-dimensional: la integral con respecto al
área.
En el caso de la integral con respecto a longitud de arco,
si \(\rho\) es una función continua, definida sobre una curva suave
\(\gamma:[a,b]\to \mathbb{R}^n\), la integral con respecto a
la longitud de arco es
\[
\int_{a}^b \rho(\alpha(t))\|\alpha'(t)\|dt
\]
donde podemos pensar el término \(\|\alpha'\|\) como el
factor que deforma la longitd del intervalo \([a,b]\) para dar la longitud
de la curva \(\gamma\).
En el caso 2-dimensional, para una superficie
parametrizada por \(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\) sabemos que el factor que da el
área superficial es \(\|\partial_u \mathbb{r}\times \partial_v \mathbb{r} \|\)
por lo tanto, copiando la definición de integral con respecto a longitud
de arco tenemos una expresión
\[
\int_{\mathcal{R}} (\rho\circ \mathbb{r}) \|\partial_u \mathbb{r}\times \partial_v \mathbb{r} \| du\otimes dv
\]
donde ahora \(\rho\) es una función continua definida sobre
la superficie.
Definición
Integral con respecto area superficial
Sea \(\mathcal{S}\subset \mathbb{R}^3\) una superficie suave parametrizada
con parametrización clase \(C^1\) \(\mathbb{r}:\mathcal{R} \to \mathbb{R}^3\).
Dada una función escalar \(f:\mathcal{S}\to \mathbb{R}\), continua sobre
\(\mathcal{S}\), definimos la integral de \(f\) con respecto area superficial como
\[
\int_{\mathcal{S}}f |d\mathcal{S}|=\int_{\mathcal{R}}f(\mathbb{r}(u,v))\|\partial_u \mathbb{r}\times \partial_v\mathbb{r} \|du\otimes dv
\]
también se puede denotar como \(\int_{\mathbb{r}}f |d\mathbb{r}|\).
Ejercicio
Calcula las integrales con respecto al área.
\(\int_{\mathcal{S}} 2y |dS|\), donde \(S\) es el helicoide
con parametrización \(\mathbb{r}(u,v)=(u\cos(v), u\sen(v), v)\)
\(0\leq u \leq 1 , 0\leq v \leq \pi\).
\(\int_{\mathcal{S}}x^2yz^2 |dS|\), donde
\(S\) es la parte del plano \(z=1+2x+3y\) que está por
arriba del rectángulo \([0,3]\times [0,1]\).
\(\int_{\mathcal{S}} (x+y) |dS|\), donde \(\mathbb{S}\) es la
región triángular con vértices \((1,0,0), (0,-2,0), (0,0,2)\).
Sea \(f: S \rightarrow \mathbb{R}\) definida como
\(f(x, y, z) = 2y \), entonces
\(f(\mathbb{r}(u,v)) = 2u\sen(v)\).
Por lo tanto,
\[
\int_S 2y|dS| = \int_R 2u\sen(v)
\Vert \partial_u\mathbb{r} \times \partial_v\mathbb{r}
\Vert dudv
\]
donde \(R = [0, 1] \times [0, \pi]\).
Primero empezaremos por calcular
\( \partial_u\mathbb{r}\) y
\( \partial_v\mathbb{r}\),
seguido de calcular
\(\partial_u\mathbb{r} \times \partial_v\mathbb{r}\)
y calcular \(\Vert \partial_u\mathbb{r} \times
\partial_v\mathbb{r} \Vert\),
por último desarrollamos y calculamos \(\int_S 2y|dS|\).
Por lo tanto:
\[
\int_S 2y|dS| = \frac{4}{3}(2\sqrt{2} - 1) .
\]
Ejercicio
Sea \(\mathcal{S}\subset \mathbb{R}^3\) una superficie suave parametrizada.
Sea \(\mathbb{F}:\mathcal{S}\to \mathbb{R}^3\) un campo vectorial
continuo. Prueba que
\[
\left|\int_{\mathcal{S}}\mathbb{F}\cdot d\mathcal{S} \right| \leq \int_{\mathcal{S}}\|\mathbb{F} \| |d\mathcal{S}|
\]
Ejercicio
Este ejercicio relaciona las integrales con respecto
al área con las integrales de superficie.
Sea \(U \subset \mathbb{R}^3\) un abierto y considera
\(\mathbb{F}:U\to \mathbb{R}^3\), un campo clase \(C^1\)
sobre \(U\).
Sea \(S\subset \mathbb{R}^3\) una superficie
parametrizada suave con parametrización clase \(C^1\)
\(\mathbb{r}:\mathcal{R}\to \mathbb{R}^3\) y
con vector normal unitario \(\mathbb{n}\).
Por \(\mathcal{S}\) denotamos a la media esfera dada por
\(x^2+y^2+z^2 = 1\), con \(z \geq 0\) y
vector normal unitario \(\mathbb{n}\) apuntando hacia afuera. Sea
\(\mathbb{F}=(x,y,0)\). Calcula \(\int_{\mathcal{S}} (\mathbb{F}\cdot \mathbb{n})|dS|\).
Ejercicio
Sea \(S\) la porción del cilíndro \(x^2+y^2=1\) con \(a\leq z \leq b\)
orientada de tal forma que el vector normal apunta hacia afuera.
Sea \(U\) un abierto que contenga a \(\mathcal{S}\) y
\(\mathbb{F}:\mathbb{R}^3 \to \mathbb{R}^3\) un campo vectorial clase
\(C^1\).
Prueba que
\[
\int_{\mathcal{S}}(\nabla \times \mathbb{F})\cdot d\mathcal{S}=\int_{\gamma_1} \mathbb{F} \cdot d\gamma_1
+\int_{\gamma_2} \mathbb{F}\cdot d\gamma_2
\]
donde \(\gamma_1\) es la circunferencia de la base del cilíndro
recorrida en el sentido positivo y \(\gamma_2\) es la circunferencia del techo del cilíndro
recorrida en el sentido negativo, vistas desde arriba.
Ejercicio
Sea \(\mathcal{S}\) la superficie cilíndrica con tapa formada por
\(\mathcal{S}_1\cup \mathcal{S}_2\), donde
\(\mathcal{S}_1\) es la parte del cilíndro \(x^2+y^2=1\) con \(0\leq z \leq 1\)
y \(\mathcal{S}_2\) es el hemisferio de la esfera
\(x^2+y^2+(z-1)^2=1\) con \(z\geq 1\).
Sea \(U\subseteq \mathbb{R}^3\) un abierto y convexo.
Supongamos que \(\mathbb{F}:U\to \mathbb{R}^3\) un campo clase
\(C^1\) tal que \(\nabla \times \mathbb{F}=0\). Entonces
\(\mathbb{F}\) es conservativo.